第一天 其中在开篇的的时候谈到了遗传算法(
Genetic Algorithm
来自 <https://blog.csdn.net/u010451580/article/details/51178225>
)的问题 相关链接 https://blog.csdn.net/u010451580/article/details/51178225
演化算法的过程
Anatomy of an evolutionary robotics experiment:
- Create a task environment.
- Create the robot.
- Create the robot’s brain, or Artificial Neural Network (ANN).
- Use an evolutionary algorithm to optimize the ANN so that the robot performs the
desired task in its environment.
Week plan
Week 1 to Week 10
Complete the weekly work of the question
Weeks 11 to 14: Use the system to conduct an evolutionary robotics experiment.
- Given the same optimizer, neural network and eight hours of behavior
optimization on the same computer, does a quadrupedal robot evolve to walk
further or not as far as a hexapedal robot, or is there no significant difference?
- Create five fitness functions that not only select for locomotion on the quadrupedal
robot, but each also selects for a particular gait: walking, trotting, canter, galloping
and pronking.
- Create a fitness function that rewards NNs for locomotion, but penalizes them for
requiring a lot of energy to realize the gait. This is difficult, as there are two
solutions that are not desirable: evolution finds fast but inefficient gaits, or ‘gaits’ in
which the robot does not move, and therefore does not consume energy.
- Equip the robot with a simulated laser range finder, which tells the robot about
objects in its environment. Evolve a robot that walks toward round objects, but
walks away from rectangular objects.
Assign 1
The web http://www.uvm.edu/~mwagy/robots/dotbot/db.html
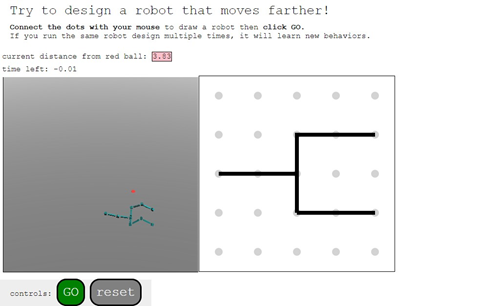
https://s2.ax1x.com/2019/01/14/FxVlJf.jpg
The next is to intall Pyrosim 来自 <https://www.reddit.com/r/ludobots/wiki/pyrosim/simulation>

